 资讯
资讯据外媒9月6日报道,据(jù)资料显示(shì)马达加(jiā)斯(sī)加发(fā)声蟑(zhāng)螂,是一种黑褐色的无脊(jǐ)椎动物,与食指(zhǐ)一(yī)样长。当它感到受到威(wēi)胁时,它(tā)会通过空气使其(qí)背部的孔(kǒng)发(fā)出(chū)嘶(sī)嘶声(shēng)。其发出的这(zhè)种声(shēng)响,类似于响尾蛇尾部所发出的嘎嘎(gā)声。近日,科学家们(men)将(jiāng)上述这种蟑螂作为灵感,来(lái)制造昆虫机器人。希望有朝(cháo)一日(rì)可以用其来监(jiān)测环境或在自然灾害后帮助城市搜索(suǒ)和救援(yuán)任务。
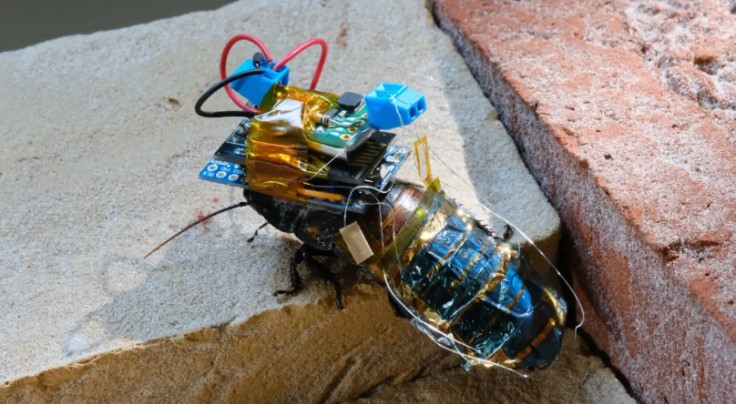
经过改(gǎi)造后(hòu)的(de)蟑螂机器人
在周一(yī)发表(biǎo)在《npj Flexible Electronics》杂志上的一项新研究(jiū)显示,一个(gè)国际研究团队(Riken)对外透露,他们已(yǐ)经(jīng)设计了一个系统,其可以(yǐ)从远处远程控制蟑螂的腿。
简单(dān)来说,该系统是(shì)一(yī)个可以连接到蟑螂神经系统(tǒng)的“背包(bāo)”,其功率输(shū)出比以前(qián)的设备高出约50倍,并采用不(bú)会阻碍蟑螂运动的超薄(báo)柔性太阳能电(diàn)池制成。按下按钮会向(xiàng)“背包”发动电击(jī),从而诱(yòu)使蟑(zhāng)螂向某个方向移动。
据了解,蟑螂机(jī)器人并不是一个新(xīn)想(xiǎng)法。早(zǎo)在2012年,北卡罗来纳州(zhōu)立大学的研究人(rén)员(yuán)就已经对马达加斯加发声蟑(zhāng)螂(láng)进行一种无线操控实验,结果表明(míng)这类昆虫可以被远程控(kòng)制在轨道上(shàng)行走。
科学家们使用的方法是将背包连接起来并将电线连接到蟑螂的“尾须”,这是(shì)腹部(bù)末端的两个附属物,基本上是感觉神经。一个在左边,一个在(zài)右边。先(xiān)前的研究表明,任何一侧的电脉冲都可以刺(cì)激(jī)蟑螂朝那个方向移动(dòng),从而(ér)使研究人(rén)员能(néng)够控制运动。但(dàn)是要发送和接收信号(hào)就需要为背包(bāo)供电。但电(diàn)池终究会耗尽电量,这样机器人蟑螂就会失去联络。
为了克服这(zhè)个问题(tí),Riken团队将系统设计为太(tài)阳(yáng)能和可充电的。将电池和刺(cì)激模块连接到蟑螂的胸(xiōng)部(其身体的(de)上半部分(fèn))。然后再确保(bǎo)太阳能电池模块(kuài)能够(gòu)黏(nián)附(fù)在蟑螂的腹(fù)部,即身体的分段下部。
虽然人类已经找到了最佳的背包佩(pèi)戴方式,但对(duì)于昆虫来说却不尽相同(tóng)。例如,蟑螂(láng)腹部的分段特性使其能(néng)够在进入毛(máo)茸茸的情况下扭曲自己或翻转自己。如果你把一个黏(nián)性背包或充电式电池安装在其上面,就会限制它的运(yùn)动(dòng)并剥(bāo)夺它的机动(dòng)能力。
为了克服这(zhè)个问题,Riken团队测试了许(xǔ)多(duō)薄(báo)电(diàn)子薄膜,让他们的蟑(zhāng)螂进行了(le)一(yī)系(xì)列实验,并(bìng)观察蟑螂如何(hé)根据薄膜(mó)的厚度移动。最后,该团队决定使用比人类(lèi)头(tóu)发细约17倍的模(mó)块。团(tuán)队成员将该模块附着(zhe)在蟑螂腹(fù)部,此举更好(hǎo)地保证了蟑螂的行走自由度,并(bìng)且还停留(liú)了大(dà)约一(yī)个月,大大超(chāo)过(guò)了以(yǐ)前(qián)的系统。
“目前的系统只有一个无(wú)线运动控制系统,因此准备城市救援(yuán)等应用是不够的,”日本理研的柔性电子专(zhuān)家Kenjiro Fukuda说。“通过集成(chéng)传(chuán)感器和摄像头(tóu)等其他所需设(shè)备,我们可(kě)以将我们的机器人昆(kūn)虫用于此类目的。”
值得注意(yì)的是(shì),由于超薄太阳能电池的(de)设计(jì),福田指出它可以应(yīng)用于其他昆虫——甚至有可能创造出(chū)由人类双手控制的机器(qì)人(rén)昆虫(chóng)飞行大军(jun1)。他表示,甲虫(chóng)和蝉是潜在(zài)的(de)候(hòu)选者。










")

")
络110")