|
公司基本资料信息
|
|||||||||||||||||||||||||||


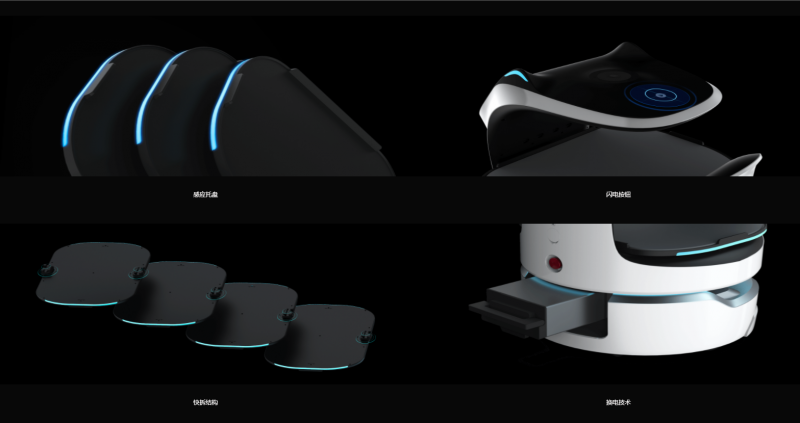




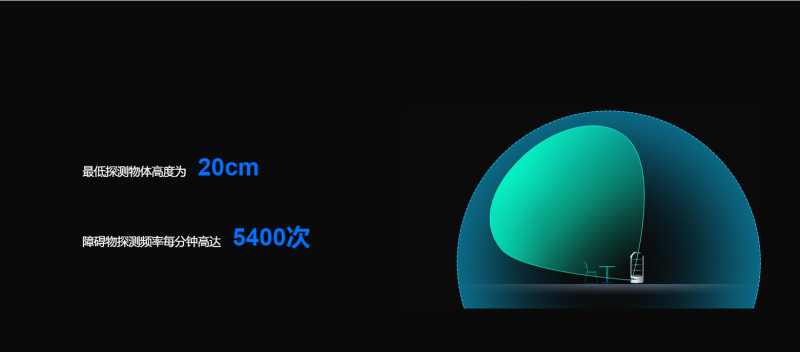


PUDUSLAM是普渡科技自(zì)主研发的多传感器融合SLAM算法,采用了视觉摄(shè)像头、激光雷达、IMU、编码器、RGB-D深度摄像头、超声(shēng)波雷(léi)达等多种传感器(qì)的结合,能(néng)实现厘米(mǐ)级的即(jí)时定位与高(gāo)精度的地图构(gòu)建,在(zài)餐厅这类复(fù)杂、混合(hé)场景也能运行。为追(zhuī)求更高的安全性,“贝拉”搭载3D传感器,配合全新模块化底盘,任(rèn)意角度,遇障即(jí)停,随转即(jí)走(zǒu)。

 沪公网备31010102005835号
沪公网备31010102005835号
警察")
息")
")

扫一扫,反馈当(dāng)前页面
微信公众号



 通(tōng)过(guò)认(rèn)证
通(tōng)过(guò)认(rèn)证 击(jī)交谈/留言")




